Node.js 源码剖析
第四章 线程池
Libuv是单线程事件驱动的异步IO库,对于阻塞式或耗时的操作,如果在Libuv的主循环里执行的话,就会阻塞后面的任务执行,所以Libuv里维护了一个线程池,它负责处理Libuv中耗时或者导致阻塞的操作,比如文件IO、DNS、自定义的耗时任务。线程池在Libuv架构中的位置如图4-1所示。
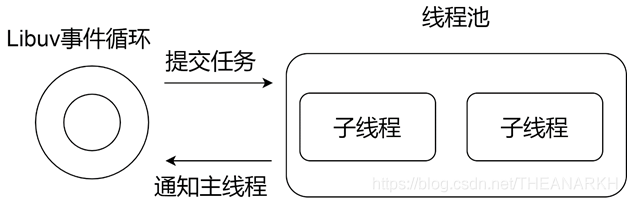
Libuv主线程通过线程池提供的接口把任务提交给线程池,然后立刻返回到事件循环中继续执行,线程池维护了一个任务队列,多个子线程会互斥地从中摘下任务节点执行,当子线程执行任务完毕后会通知主线程,主线程在事件循环的Poll IO阶段就会执行对应的回调。下面我们看一下线程池在Libuv中的实现。
4.1主线程和子线程间通信
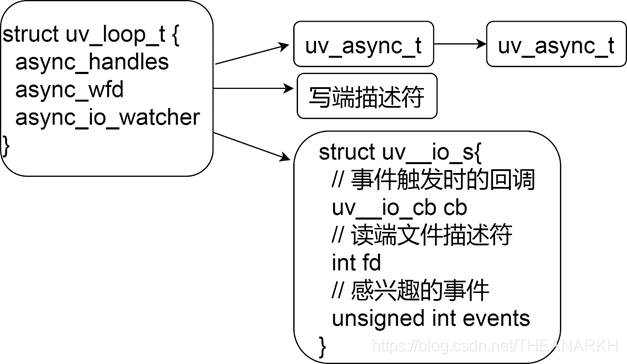
Libuv子线程和主线程的通信是使用uv_async_t结构体实现的。Libuv使用loop->async_handles队列记录所有的uv_async_t结构体,使用loop->async_io_watcher作为所有uv_async_t结构体的IO观察者,即loop-> async_handles队列上所有的handle都是共享async_io_watcher这个IO观察者的。第一次插入一个uv_async_t结构体到async_handle队列时,会初始化IO观察者,如果再次注册一个async_handle,只会在loop->async_handle队列和handle队列插入一个节点,而不会新增一个IO观察者。当uv_async_t结构体对应的任务完成时,子线程会设置IO观察者为可读。Libuv在事件循环的Poll IO阶段就会处理IO观察者。下面我们看一下uv_async_t在Libuv中的使用。
4.1.1 初始化
使用uv_async_t之前首先需要执行uv_async_init进行初始化。
int uv_async_init(uv_loop_t* loop,
uv_async_t* handle,
uv_async_cb async_cb) {
int err;
// 给Libuv注册一个观察者io
err = uv__async_start(loop);
if (err)
return err;
// 设置相关字段,给Libuv插入一个handle
uv__handle_init(loop, (uv_handle_t*)handle, UV_ASYNC);
// 设置回调
handle->async_cb = async_cb;
// 初始化标记字段,0表示没有任务完成
handle->pending = 0;
// 把uv_async_t插入async_handle队列
QUEUE_INSERT_TAIL(&loop->async_handles, &handle->queue);
uv__handle_start(handle);
return 0;
} uv_async_init函数主要初始化结构体uv_async_t的一些字段,然后执行QUEUE_INSERT_TAIL给Libuv的async_handles队列追加一个节点。我们看到还有一个uv__async_start函数。我们看一下uv__async_start的实现。
static int uv__async_start(uv_loop_t* loop) {
int pipefd[2];
int err;
// uv__async_start只执行一次,有fd则不需要执行了
if (loop->async_io_watcher.fd != -1)
return 0;
// 获取一个用于进程间通信的fd(Linux的eventfd机制)
err = uv__async_eventfd();
/*
成功则保存fd,失败说明不支持eventfd,
则使用管道通信作为进程间通信
*/
if (err >= 0) {
pipefd[0] = err;
pipefd[1] = -1;
}
else if (err == UV_ENOSYS) {
// 不支持eventfd则使用匿名管道
err = uv__make_pipe(pipefd, UV__F_NONBLOCK);
#if defined(__Linux__)
if (err == 0) {
char buf[32];
int fd;
snprintf(buf, sizeof(buf), "/proc/self/fd/%d", pipefd[0]); // 通过一个fd就可以实现对管道的读写,高级用法
fd = uv__open_cloexec(buf, O_RDWR);
if (fd >= 0) {
// 关掉旧的
uv__close(pipefd[0]);
uv__close(pipefd[1]);
// 赋值新的
pipefd[0] = fd;
pipefd[1] = fd;
}
}
#endif
}
// err大于等于0说明拿到了通信的读写两端
if (err < 0)
return err;
/*
初始化IO观察者async_io_watcher,
把读端文件描述符保存到IO观察者
*/
uv__io_init(&loop->async_io_watcher, uv__async_io, pipefd[0]);
// 注册IO观察者到loop里,并注册感兴趣的事件POLLIN,等待可读
uv__io_start(loop, &loop->async_io_watcher, POLLIN);
// 保存写端文件描述符
loop->async_wfd = pipefd[1];
return 0;
} uv__async_start只会执行一次,时机在第一次执行uv_async_init的时候。uvasync_start主要的逻辑如下 1 获取通信描述符(通过eventfd生成一个通信的fd(充当读写两端)或者管道生成线程间通信的两个fd表示读端和写端)。 2 封装感兴趣的事件和回调到IO观察者然后追加到watcher_queue队列,在Poll IO阶段,Libuv会注册到epoll里面,如果有任务完成,也会在Poll IO阶段执行回调。 3 保存写端描述符。任务完成时通过写端fd通知主线程。 我们看到uvasync_start函数里有很多获取通信文件描述符的逻辑,总的来说,是为了完成两端通信的功能。初始化async结构体后,Libuv结构如图4-2所示。
4.1.2 通知主线程
初始化async结构体后,如果async结构体对应的任务完成后,就会通知主线程,子线程通过设置这个handle的pending为1标记任务完成,然后再往管道写端写入标记,通知主线程有任务完成了。
int uv_async_send(uv_async_t* handle) {
/* Do a cheap read first. */
if (ACCESS_ONCE(int, handle->pending) != 0)
return 0;
/*
如pending是0,则设置为1,返回0,如果是1则返回1,
所以如果多次调用该函数是会被合并的
*/
if (cmpxchgi(&handle->pending, 0, 1) == 0)
uv__async_send(handle->loop);
return 0;
}
static void uv__async_send(uv_loop_t* loop) {
const void* buf;
ssize_t len;
int fd;
int r;
buf = "";
len = 1;
fd = loop->async_wfd;
#if defined(__Linux__)
// 说明用的是eventfd而不是管道,eventfd时读写两端对应同一个fd
if (fd == -1) {
static const uint64_t val = 1;
buf = &val;
len = sizeof(val);
// 见uv__async_start
fd = loop->async_io_watcher.fd; /* eventfd */
}
#endif
// 通知读端
do
r = write(fd, buf, len);
while (r == -1 && errno == EINTR);
if (r == len)
return;
if (r == -1)
if (errno == EAGAIN || errno == EWOULDBLOCK)
return;
abort();
} uv_async_send首先拿到写端对应的fd,然后调用write函数,此时,往管道的写端写入数据,标记有任务完成。有写则必然有读。读的逻辑是在uvio_poll中实现的。uv__io_poll函数即Libuv中Poll IO阶段执行的函数。在uvio_poll中会发现管道可读,然后执行对应的回调uv__async_io。
4.1.3 主线程处理回调
static void uv__async_io(uv_loop_t* loop,
uv__io_t* w,
unsigned int events) {
char buf[1024];
ssize_t r;
QUEUE queue;
QUEUE* q;
uv_async_t* h;
for (;;) {
// 消费所有的数据
r = read(w->fd, buf, sizeof(buf));
// 数据大小大于buf长度(1024),则继续消费
if (r == sizeof(buf))
continue;
// 成功消费完毕,跳出消费的逻辑
if (r != -1)
break;
// 读繁忙
if (errno == EAGAIN || errno == EWOULDBLOCK)
break;
// 读被中断,继续读
if (errno == EINTR)
continue;
abort();
}
// 把async_handles队列里的所有节点都移到queue变量中
QUEUE_MOVE(&loop->async_handles, &queue);
while (!QUEUE_EMPTY(&queue)) {
// 逐个取出节点
q = QUEUE_HEAD(&queue);
// 根据结构体字段获取结构体首地址
h = QUEUE_DATA(q, uv_async_t, queue);
// 从队列中移除该节点
QUEUE_REMOVE(q);
// 重新插入async_handles队列,等待下次事件
QUEUE_INSERT_TAIL(&loop->async_handles, q);
/*
将第一个参数和第二个参数进行比较,如果相等,
则将第三参数写入第一个参数,返回第二个参数的值,
如果不相等,则返回第一个参数的值。
*/
/*
判断触发了哪些async。pending在uv_async_send里设置成1,
如果pending等于1,则清0,返回1.如果pending等于0,则返回0
*/
if (cmpxchgi(&h->pending, 1, 0) == 0)
continue;
if (h->async_cb == NULL)
continue;
// 执行上层回调
h->async_cb(h);
}
} uv__async_io会遍历async_handles队列,pending等于1的话说明任务完成,然后执行对应的回调并清除标记位。
4.2 线程池的实现
了解了Libuv中子线程和主线程的通信机制后,我们来看一下线程池的实现。
4.2.1 线程池的初始化
线程池是懒初始化的,Node.js启动的时候,并没有创建子线程,而是在提交第一个任务给线程池时,线程池才开始初始化。我们先看线程池的初始化逻辑,然后再看它的使用。
static void init_threads(void) {
unsigned int i;
const char* val;
// 默认线程数4个,static uv_thread_t default_threads[4];
nthreads = ARRAY_SIZE(default_threads);
// 判断用户是否在环境变量中设置了线程数,是的话取用户定义的
val = getenv("UV_THREADPOOL_SIZE");
if (val != NULL)
nthreads = atoi(val);
if (nthreads == 0)
nthreads = 1;
// #define MAX_THREADPOOL_SIZE 128最多128个线程
if (nthreads > MAX_THREADPOOL_SIZE)
nthreads = MAX_THREADPOOL_SIZE;
threads = default_threads;
// 超过默认大小,重新分配内存
if (nthreads > ARRAY_SIZE(default_threads)) {
threads = uv__malloc(nthreads * sizeof(threads[0]));
}
// 初始化条件变量,用于有任务时唤醒子线程,没有任务时挂起子线程
if (uv_cond_init(&cond))
abort();
// 初始化互斥变量,用于多个子线程互斥访问任务队列
if (uv_mutex_init(&mutex))
abort();
// 初始化三个队列
QUEUE_INIT(&wq);
QUEUE_INIT(&slow_io_pending_wq);
QUEUE_INIT(&run_slow_work_message);
// 创建多个线程,工作函数为worker,sem为worker入参
for (i = 0; i < nthreads; i++)
if (uv_thread_create(threads + i, worker, &sem))
abort();
} 线程池初始化时,会根据配置的子线程数创建对应数量的线程。默认是4个,最大128个子线程(不同版本的Libuv可能会不一样),我们也可以通过环境变量设置自定义的大小。线程池的初始化主要是初始化一些数据结构,然后创建多个线程,接着在每个线程里执行worker函数处理任务。后面我们会分析worker的逻辑。
4.2.2 提交任务到线程池
了解线程池的初始化之后,我们看一下如何给线程池提交任务
// 给线程池提交一个任务
void uv__work_submit(uv_loop_t* loop,
struct uv__work* w,
enum uv__work_kind kind,
void (*work)(struct uv__work* w),
void (*done)(struct uv__work* w, int status)){
/*
保证已经初始化线程,并只执行一次,所以线程池是在提交第一个
任务的时候才被初始化,init_once -> init_threads
*/
uv_once(&once, init_once);
w->loop = loop;
w->work = work;
w->done = done;
post(&w->wq, kind);
} 这里把业务相关的函数和任务完成后的回调函数封装到uvwork结构体中。uvwork结构定义如下。
struct uv__work {
void (*work)(struct uv__work *w);
void (*done)(struct uv__work *w, int status);
struct uv_loop_s* loop;
void* wq[2];
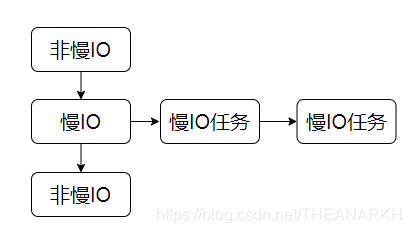
}; 然后调调用post函数往线程池的队列中加入一个新的任务。Libuv把任务分为三种类型,慢IO(DNS解析)、快IO(文件操作)、CPU密集型等,kind就是说明任务的类型的。我们接着看post函数。
static void post(QUEUE* q, enum uv__work_kind kind) {
// 加锁访问任务队列,因为这个队列是线程池共享的
uv_mutex_lock(&mutex);
// 类型是慢IO
if (kind == UV__WORK_SLOW_IO) {
/*
插入慢IO对应的队列,Libuv这个版本把任务分为几种类型,
对于慢IO类型的任务,Libuv是往任务队列里面插入一个特殊的节点
run_slow_work_message,然后用slow_io_pending_wq维护了一个慢IO
任务的队列,当处理到run_slow_work_message这个节点的时候,
Libuv会从slow_io_pending_wq队列里逐个取出任务节点来执行。
*/
QUEUE_INSERT_TAIL(&slow_io_pending_wq, q);
/*
有慢IO任务的时候,需要给主队列wq插入一个消息节点
run_slow_work_message,说明有慢IO任务,所以如果
run_slow_work_message是空,说明还没有插入主队列。需要进行
q = &run_slow_work_message;赋值,然后把
run_slow_work_message插入主队列。如果run_slow_work_message
非空,说明已经插入线程池的任务队列了。解锁然后直接返回。
*/
if (!QUEUE_EMPTY(&run_slow_work_message)) {
uv_mutex_unlock(&mutex);
return;
}
// 说明run_slow_work_message还没有插入队列,准备插入队列
q = &run_slow_work_message;
}
// 把节点插入主队列,可能是慢IO消息节点或者一般任务
QUEUE_INSERT_TAIL(&wq, q);
/*
有空闲线程则唤醒它,如果大家都在忙,
则等到它忙完后就会重新判断是否还有新任务
*/
if (idle_threads > 0)
uv_cond_signal(&cond);
// 操作完队列,解锁
uv_mutex_unlock(&mutex);
} 这就是Libuv中线程池的生产者逻辑。任务队列的架构如图4-3所示。
除了上面提到的,Libuv还提供了另外一种生产任务的方式,即uv_queue_work函数,它只提交CPU密集型的任务(在Node.js的crypto模块中使用)。下面我们看uv_queue_work的实现。
int uv_queue_work(uv_loop_t* loop,
uv_work_t* req,
uv_work_cb work_cb,
uv_after_work_cb after_work_cb) {
if (work_cb == NULL)
return UV_EINVAL;
uv__req_init(loop, req, UV_WORK);
req->loop = loop;
req->work_cb = work_cb;
req->after_work_cb = after_work_cb;
uv__work_submit(loop,
&req->work_req,
UV__WORK_CPU,
uv__queue_work,
uv__queue_done);
return 0;
} uv_queue_work函数其实也没有太多的逻辑,它保存用户的工作函数和回调到request中。然后把uvqueue_work和uv__queue_done封装到uvwork中,接着提交任务到线程池中。所以当这个任务被执行的时候。它会执行工作函数uv__queue_work。
static void uv__queue_work(struct uv__work* w) {
// 通过结构体某字段拿到结构体地址
uv_work_t* req = container_of(w, uv_work_t, work_req);
req->work_cb(req);
} 我们看到uv__queue_work其实就是对用户定义的任务函数进行了封装。这时候我们可以猜到,uv__queue_done也只是对用户回调的简单封装,即它会执行用户的回调。
4.2.3 处理任务
我们提交了任务后,线程自然要处理,初始化线程池的时候我们分析过,worker函数是负责处理任务。我们看一下worker函数的逻辑。
static void worker(void* arg) {
struct uv__work* w;
QUEUE* q;
int is_slow_work;
// 线程启动成功
uv_sem_post((uv_sem_t*) arg);
arg = NULL;
// 加锁互斥访问任务队列
uv_mutex_lock(&mutex);
for (;;) {
/*
1 队列为空
2 队列不为空,但是队列中只有慢IO任务且正在执行的慢IO任务
个数达到阈值则空闲线程加一,防止慢IO占用过多线程,导致
其它快的任务无法得到执行
*/
while (QUEUE_EMPTY(&wq) ||
(QUEUE_HEAD(&wq) == &run_slow_work_message &&
QUEUE_NEXT(&run_slow_work_message) == &wq &&
slow_io_work_running >= slow_work_thread_threshold())) {
idle_threads += 1;
// 阻塞,等待唤醒
uv_cond_wait(&cond, &mutex);
// 被唤醒,开始干活,空闲线程数减一
idle_threads -= 1;
}
// 取出头结点,头指点可能是退出消息、慢IO,一般请求
q = QUEUE_HEAD(&wq);
// 如果头结点是退出消息,则结束线程
if (q == &exit_message) {
/*
唤醒其它因为没有任务正阻塞等待任务的线程,
告诉它们准备退出
*/
uv_cond_signal(&cond);
uv_mutex_unlock(&mutex);
break;
}
// 移除节点
QUEUE_REMOVE(q);
// 重置前后指针
QUEUE_INIT(q);
is_slow_work = 0;
/*
如果当前节点等于慢IO节点,上面的while只判断了是不是只有慢
IO任务且达到阈值,这里是任务队列里肯定有非慢IO任务,可能有
慢IO,如果有慢IO并且正在执行的个数达到阈值,则先不处理该慢
IO任务,继续判断是否还有非慢IO任务可执行。
*/
if (q == &run_slow_work_message) {
// 达到阈值,该节点重新入队,因为刚才被删除了
if (slow_io_work_running >= slow_work_thread_threshold()) {
QUEUE_INSERT_TAIL(&wq, q);
continue;
}
/*
没有慢IO任务则继续,这时候run_slow_work_message
已经从队列中被删除,下次有慢IO的时候重新入队
*/
if (QUEUE_EMPTY(&slow_io_pending_wq))
continue;
// 有慢IO,开始处理慢IO任务
is_slow_work = 1;
/*
正在处理慢IO任务的个数累加,用于其它线程判断慢IO任务个
数是否达到阈值, slow_io_work_running是多个线程共享的变量
*/
slow_io_work_running++;
// 摘下一个慢IO任务
q = QUEUE_HEAD(&slow_io_pending_wq);
// 从慢IO队列移除
QUEUE_REMOVE(q);
QUEUE_INIT(q);
/*
取出一个任务后,如果还有慢IO任务则把慢IO标记节点重新入
队,表示还有慢IO任务,因为上面把该标记节点出队了
*/
if (!QUEUE_EMPTY(&slow_io_pending_wq)) {
QUEUE_INSERT_TAIL(&wq, &run_slow_work_message);
// 有空闲线程则唤醒它,因为还有任务处理
if (idle_threads > 0)
uv_cond_signal(&cond);
}
}
// 不需要操作队列了,尽快释放锁
uv_mutex_unlock(&mutex);
// q是慢IO或者一般任务
w = QUEUE_DATA(q, struct uv__work, wq);
// 执行业务的任务函数,该函数一般会阻塞
w->work(w);
// 准备操作loop的任务完成队列,加锁
uv_mutex_lock(&w->loop->wq_mutex);
// 置空说明执行完了,见cancel逻辑
w->work = NULL;
/*
执行完任务,插入到loop的wq队列,在uv__work_done的时候会
执行该队列的节点
*/
QUEUE_INSERT_TAIL(&w->loop->wq, &w->wq);
// 通知loop的wq_async节点
uv_async_send(&w->loop->wq_async);
uv_mutex_unlock(&w->loop->wq_mutex);
// 为下一轮操作任务队列加锁
uv_mutex_lock(&mutex);
/*
执行完慢IO任务,记录正在执行的慢IO个数变量减1,
上面加锁保证了互斥访问这个变量
*/
if (is_slow_work) {
slow_io_work_running--;
}
}
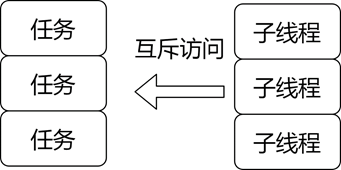
} 我们看到消费者的逻辑似乎比较复杂,对于慢IO类型的任务,Libuv限制了处理慢IO任务的线程数,避免耗时比较少的任务得不到处理。其余的逻辑和一般的线程池类似,就是互斥访问任务队列,然后取出节点执行,执行完后通知主线程。结构如图4-4所示。
4.2.4 通知主线程
线程执行完任务后,并不是直接执行用户回调,而是通知主线程,由主线程统一处理,这是Node.js单线程事件循环的要求,也避免了多线程带来的复杂问题,我们看一下这块的逻辑。一切要从Libuv的初始化开始
uv_default_loop();-> uv_loop_init();-> uv_async_init(loop, &loop->wq_async, uv__work_done);刚才我们已经分析过主线程和子线程的通信机制,wq_async是用于线程池中子线程和主线程通信的async handle,它对应的回调是uv__work_done。所以当一个线程池的线程任务完成时,通过uv_async_send(&w->loop->wq_async)设置loop->wq_async.pending = 1,然后通知IO观察者,Libuv在Poll IO阶段就会执行该handle对应的回调uv__work_done函数。那么我们就看看这个函数的逻辑。
void uv__work_done(uv_async_t* handle) {
struct uv__work* w;
uv_loop_t* loop;
QUEUE* q;
QUEUE wq;
int err;
// 通过结构体字段获得结构体首地址
loop = container_of(handle, uv_loop_t, wq_async);
// 准备处理队列,加锁
uv_mutex_lock(&loop->wq_mutex);
/*
loop->wq是已完成的任务队列。把loop->wq队列的节点全部移到
wp变量中,这样一来可以尽快释放锁
*/
QUEUE_MOVE(&loop->wq, &wq);
// 不需要使用了,解锁
uv_mutex_unlock(&loop->wq_mutex);
// wq队列的节点来自子线程插入
while (!QUEUE_EMPTY(&wq)) {
q = QUEUE_HEAD(&wq);
QUEUE_REMOVE(q);
w = container_of(q, struct uv__work, wq);
// 等于uv__canceled说明这个任务被取消了
err = (w->work == uv__cancelled) ? UV_ECANCELED : 0;
// 执行回调
w->done(w, err);
}
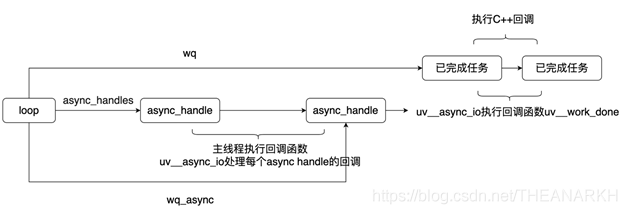
} 该函数的逻辑比较简单,逐个处理已完成的任务节点,执行回调,在Node.js中,这里的回调是C++层,然后再到JS层。结构图如图4-5所示。
4.2.5 取消任务
线程池的设计中,取消任务是一个比较重要的能力,因为在线程里执行的都是一些耗时或者引起阻塞的操作,如果能及时取消一个任务,将会减轻很多没必要的处理。不过Libuv实现中,只有当任务还在等待队列中才能被取消,如果一个任务正在被线程处理,则无法取消了。我们先看一下Libuv中是如何实现取消任务的。Libuv提供了uv__work_cancel函数支持用户取消提交的任务。我们看一下它的逻辑。
static int uv__work_cancel(uv_loop_t* loop, uv_req_t* req, struct uv__work* w) {
int cancelled;
// 加锁,为了把节点移出队列
uv_mutex_lock(&mutex);
// 加锁,为了判断w->wq是否为空
uv_mutex_lock(&w->loop->wq_mutex);
/*
cancelled为true说明任务还在线程池队列等待处理
1 处理完,w->work == NULL
2 处理中,QUEUE_EMPTY(&w->wq)为true,因
为worker在摘下一个任务的时候,重置prev和next指针
3 未处理,!QUEUE_EMPTY(&w->wq)是true 且w->work != NULL
*/
cancelled = !QUEUE_EMPTY(&w->wq) && w->work != NULL;
// 从线程池任务队列中删除该节点
if (cancelled)
QUEUE_REMOVE(&w->wq);
uv_mutex_unlock(&w->loop->wq_mutex);
uv_mutex_unlock(&mutex);
// 正在执行或者已经执行完了,则不能取消
if (!cancelled)
return UV_EBUSY;
// 打取消标记,Libuv执行回调的时候用到
w->work = uv__cancelled;
uv_mutex_lock(&loop->wq_mutex);
/*
插入loop的wq队列,对于取消的动作,Libuv认为是任务执行完了。
所以插入已完成的队列,执行回调的时候会通知用户该任务的执行结果
是取消,错误码是UV_ECANCELED
*/
QUEUE_INSERT_TAIL(&loop->wq, &w->wq);
// 通知主线程有任务完成
uv_async_send(&loop->wq_async);
uv_mutex_unlock(&loop->wq_mutex);
return 0;
} 在Libuv中,取消任务的方式就是把节点从线程池待处理队列中删除,然后打上取消的标记(w->work = uvcancelled),接着把该节点插入已完成队列,Libuv在处理已完成队列的节点时,判断如果w->work == uvcancelled则在执行用户回调时,传入错误码UV_ECANCELED,我们看到uv__work_cancel这个函数定义前面加了一个static,说明这个函数是只在本文件内使用的,Libuv对外提供的取消任务的接口是uv_cancel。