Python并行编程
- 本书说明
- 1 认识并行计算和Python
- 1.1 介绍
- 1.2 并行计算的内存架构
- 1.3 内存管理
- 1.4 并行编程模型
- 1.5 如何设计一个并行程序
- 1.6 如何评估并行程序的性能
- 1.7 介绍Python
- 1.8 并行世界的Python
- 1.9 介绍线程和进程
- 1.10 开始在Python中使用进程
- 1.11 开始在Python中使用线程
- 2 基于线程的并行
- 2.1 介绍
- 2.2 使用Python的线程模块
- 2.3 如何定义一个线程
- 2.4 如何确定当前的线程
- 2.5 如何实现一个线程
- 2.6 使用Lock进行线程同步
- 2.7 使用RLock进行线程同步
- 2.8 使用信号量进行线程同步
- 2.9 使用条件进行线程同步
- 2.10 使用事件进行线程同步
- 2.11 使用with语法
- 2.12 使用 queue 进行线程通信
- 2.13 评估多线程应用的性能
- 3 基于进程的并行
- 3.1 介绍
- 3.2 如何产生一个进程
- 3.3 如何为一个进程命名
- 3.4 如何在后台运行一个进程
- 3.5 如何杀掉一个进程
- 3.6 如何在子类中使用进程
- 3.7 如何在进程之间交换对象
- 3.8 进程如何同步
- 3.9 如何在进程之间管理状态
- 3.10 如何使用进程池
- 3.11 使用Python的mpi4py模块
- 3.12 点对点通讯
- 3.13 避免死锁问题
- 3.14 集体通讯:使用broadcast通讯
- 3.15 集体通讯:使用scatter通讯
- 3.16 集体通讯:使用gather通讯
- 3.17 使用Alltoall通讯
- 3.18 简化操作
- 3.19 如何优化通讯
- 4 异步编程
- 4.1 介绍
- 4.2 使用Python的 concurrent.futures 模块
- 4.3 使用Asyncio管理事件循环
- 4.4 使用Asyncio管理协程
- 4.5 使用Asyncio控制任务
- 4.6 使用Asyncio和Futures
- 5 分布式Python编程
- 5.1 介绍
- 5.2 使用Celery实现分布式任务
- 5.3 如何使用Celery创建任务
- 5.4 使用SCOOP进行科学计算
- 5.5 通过 SCOOP 使用 map 函数
- 5.6 使用Pyro4进行远程方法调用
- 5.7 使用 Pyro4 链接对象
- 5.8 使用Pyro4部署客户端-服务器应用
- 5.9 PyCSP和通信顺序进程
- 5.10 使用Disco进行MapReduce
- 5.11 使用RPyC远程调用
- 6 Python GPU编程
点对点通讯
MPI提供的最实用的一个特性是点对点通讯。两个不同的进程之间可以通过点对点通讯交换数据:一个进程是接收者,一个进程是发送者。
Python的 mpi4py 通过下面两个函数提供了点对点通讯功能:
Comm.Send(data, process_destination): 通过它在交流组中的排名来区分发送给不同进程的数据Comm.Recv(process_source): 接收来自源进程的数据,也是通过在交流组中的排名来区分的
Comm 变量表示交流者,定义了可以互相通讯的进程组: :
comm = MKPI.COMM_WORLD如何做
下面的例子展示了如何使用 comm.send 和 comm.recv
指令在不同的进程之间交换信息。 :
from mpi4py import MPI
comm = MPI.COMM_WORLD
rank = comm.rank
print("my rank is : " , rank)
if rank == 0:
data = 10000000
destination_process = 4
comm.send(data,dest=destination_process)
print("sending data % s " % data + "to process % d" % destination_process)
if rank == 1:
destination_process = 8
data = "hello"
comm.send(data,dest=destination_process)
print("sending data % s :" % data + "to process % d" % destination_process)
if rank == 4:
data = comm.recv(source = 0)
print("data received is = % s" % data)
if rank == 8:
data1 = comm.recv(source = 1)
print("data1 received is = % s" % data1)运行脚本的命令如下: :
$ mpiexec -n 9 python pointToPointCommunication.py得到的输出如下: :
('my rank is : ', 5)
('my rank is : ', 1)
sending data hello :to process 8
('my rank is : ', 3)
('my rank is : ', 0)
sending data 10000000 to process 4
('my rank is : ', 2)
('my rank is : ', 7)
('my rank is : ', 4)
data received is = 10000000
('my rank is : ', 8)
data1 received is = hello
('my rank is : ', 6)讨论
我们将最大进程数设置为9来运行程序。所以在交流者组 comm
中,我们可以有9个互相通讯的进程。: :
comm = MPI.COMM_WORLD同时,我们使用 rand 值来区分每个进程: :
rank = comm.rand| 我们有两个发送者进程和两个接受者进程。rank值为0的进程会发送数据给rank值为4的接受者: |
|---|
if rank==0:
data= 10000000
destination_process = 4
comm.send(data,dest=destination_process)同样的,我们可以必须指定rank值为4的进程为接收者。然后我们指定rank变量来调用
comm.recv 命令。 :
...
if rank == 4:
data = comm.recv(source=0)| 对于另外一组发送者和接收者,我们指定rank为1的作为发送者,rank为8的作为接收者。与上一组只有一点不同,这一组发送的数据类型是String。 |
|---|
if rank==1:
destination_process = 8
data= "hello"
comm.send(data,dest=destination_process)对于接收者来说,需要指定发送者的rank。 :
if rank==8:
data1=comm.recv(source=1)下图展示了 mpi4py 的点对点通讯协议:
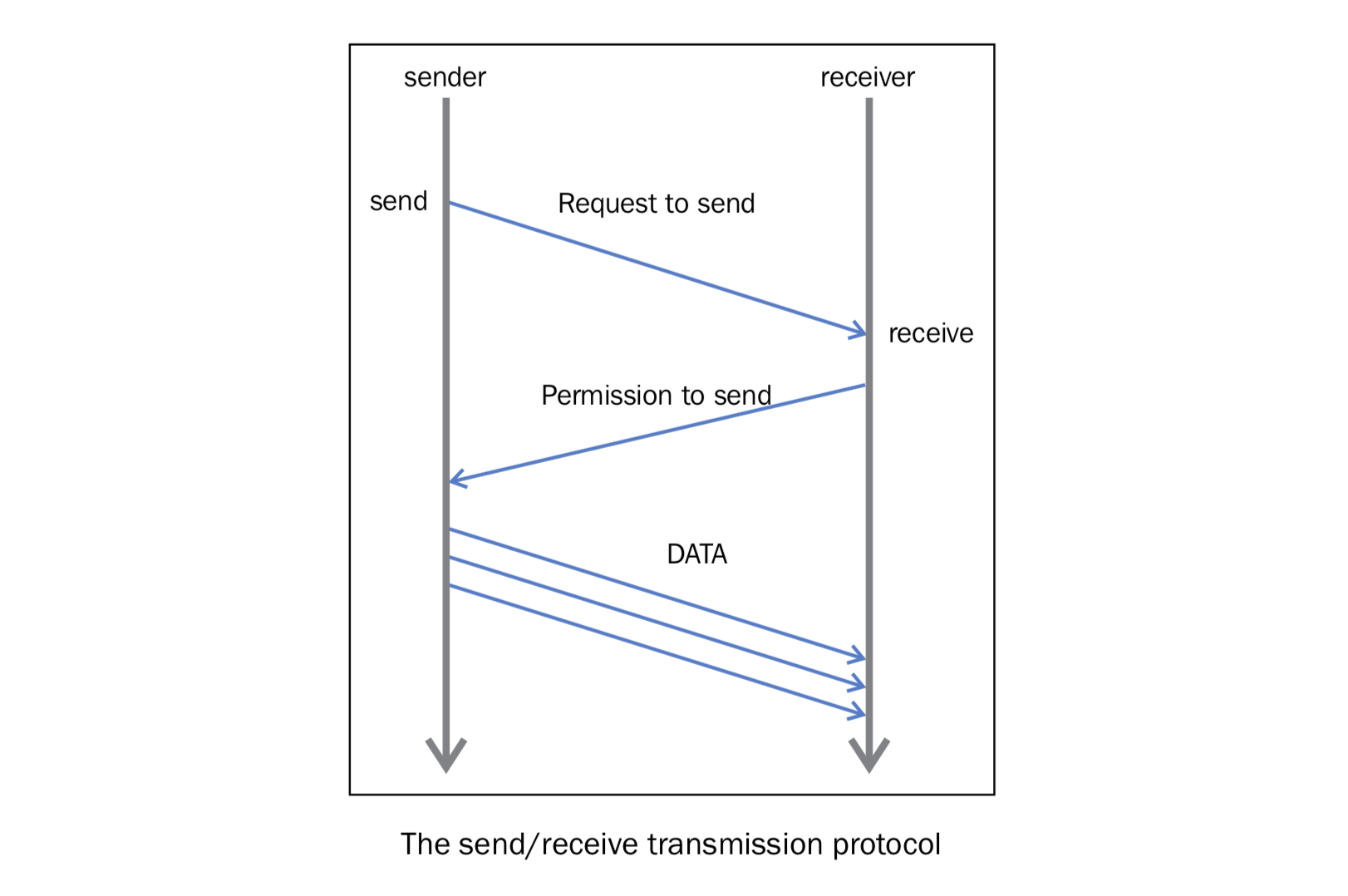
整个过程分为两部分,发送者发送数据,接收者接收数据,二者必须都指定发送方/接收方。
了解更多
comm.send() 和 comm.recv()
函数都是阻塞的函数。他们会一直阻塞调用者,知道数据使用完成。同时在MPI中,有两种方式发送和接收数据:
- buffer模式
- 同步模式
在buffer模式中,只要需要发送的数据被拷贝到buffer中,执行权就会交回到主程序,此时数据并非已经发送/接收完成。在同步模式中,只有函数真正的结束发送/接收任务之后才会返回。